瑞士联邦理工学院开发出双模态机械臂,机械手可以和臂分离 扩大抓取范围
2024-09-28 07:04:45爱云资讯21260
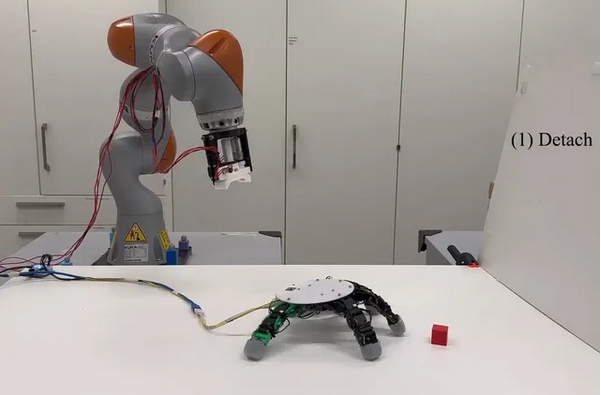
(爱云资讯消息)瑞士洛桑联邦理工学院(EPFL)的研究人员开发了一种可移动的手,它可以从机器臂上分离并自行爬行,以抓取物体,从而扩大机器人手臂的活动范围。这项研究最近在国际机器人与自动化大会(ICRA)上公布,并发表在《IEEE光谱》杂志上。
由于力量和速度,机器人手臂通常被永久地固定在地板或其他结构上以增加稳定性,这限制了其抓取范围。瑞士洛桑联邦理工学院(EPFL)学习算法与系统实验室(LASA)的研究目标是开发一种双模态机器人手,以扩大其抓取能力,包括偶尔与机器人臂分离的能力。

机器人手通常只有一个目标:抓住东西。为了设计出能够像电影《亚当斯一家》中的小东西一样自主爬行的机器人手,研究人员利用遗传算法(依赖于自然选择和进化等生物技巧)和MuJoCo物理模拟器生成并优化了基本设计,并通过迭代测试了其实用性。
该算法和模拟帮助研究人员确定了所需的关节手指数量和位置,结果发现需要五个关节手指,其布局与人类手部类似。该机器人手腕处还使用了磁性连接器,使其能够自主地与手臂连接和断开。

机械臂的手指可以向两个方向弯曲,这样它可以用其中一些手指拿起物体,而其余的则作为小小的腿来使用。这种设计在将手安装在机器人手臂上时也扩大了其用途。它可以同时拿起多个物体,而不必扭曲手臂来重新定位未使用的手指。
这只手的尺寸也比像波士顿动力公司(Boston Dynamics)的Spot机器狗小得多。Spot机器狗可以自由地用四条腿移动,已经配备了自己的机械臂和抓取器,但如果有一个可以独立操作的灵活的手,它就能更好地探索或分析Spot机器狗无法进入的区域。
相关文章
- 魔法原子人形机器人小麦首秀国际科学盛会 迎宾多位政要与诺奖得主
- 深谋科技首批康养陪伴机器人即将交付韩国蔚山政府,服务韩国独居老人
- 具身智能初创企业深谋科技携手LG、GS一起打造人型机器人多元产业落地场景
- 亿嘉和与华为云签订全面合作协议,AI助力“机器人+行业”发展
- 小码王与杭州六小龙云深处科技达成战略合作,共推 AI 机器人编程教育发展
- 图灵机器人+中文传媒:战略合作签约,共进AI出版、AI教育、AI文旅
- 从电池到人形机器人,微型伺服电缸重构两大万亿赛道!
- 2025慕尼黑上海电子展揭示技术密码:机器人行业蓬勃发展,半导体“芯脏”如何给予支撑?
- 深开鸿王成录:中国机器人产业进入“群体智能”新时代
- 立讯精密:具备机器人一站式解决方案,迈向智能制造2.0
- 开普勒“K2大黄蜂“获海外市场青睐,工业机器人迎来变革
- 巡检机器人如何应对数据远程传输难题?贝锐蒲公英提供一站式方案
- 欧洲手术台上的中国方案:术锐®机器人开启中国原创技术全球输出新纪元
- 【预登记从速】NEPCON China 2025上海世博展览馆4月22-24日邀您共探人形机器人、AI、汽车电子、低空飞行、半导体、新能源各大亮点展区
- 2025中关村论坛|云迹科技出席京港科技创新论坛,与香港诺达机器人签署战略合作协议
- 均胜电子聚焦经营质量提升,“汽车+机器人”双线布局建新增长曲线