解锁无图驾驶新时代,Nullmax纽劢纯视觉技术引领未来出行
2024-08-27 19:23:23爱云资讯2616
在自动驾驶技术日益成为汽车工业重要发展方向的今天,Nullmax纽劢凭借其创新的纯视觉自动驾驶技术,正积极推动这一技术的普及进程。与传统自动驾驶技术相比,Nullmax纽劢的纯视觉方案以其独特的优势,为自动驾驶技术的广泛应用提供了强有力的支持。

首先,Nullmax纽劢的纯视觉自动驾驶技术不依赖于高精度地图, Nullmax纽劢凭借端到端自动驾驶模型出色的场景理解能力,尤其是对于复杂道路结构的理解能力。无论是繁忙的城市街道还是偏远的乡村小路,只要道路存在,车辆就能通过自身的视觉感知能力进行驾驶,实现真正“有路就能开”的全场景智驾,而且能够应用到全球范围,不受国家和地区限制,极大地降低了自动驾驶技术的实施门槛和成本。

其次,Nullmax纽劢的纯视觉方案在传感器配置和算力需求方面也具有显著优势。相比于传统自动驾驶技术需要大量昂贵的传感器和超大算力的芯片支持,Nullmax纽劢的纯视觉方案只需配备基础的摄像头和适中的算力资源即可实现高效稳定的自动驾驶。这使得更多车型能够搭载自动驾驶系统,加速了自动驾驶技术的普及进程。并且,Nullmax纽劢的端到端模型可以同时输出动态感知、静态感知、场景描述、驾驶行为,这些不同模态的信息就可以很好地解释模型输出的结果。

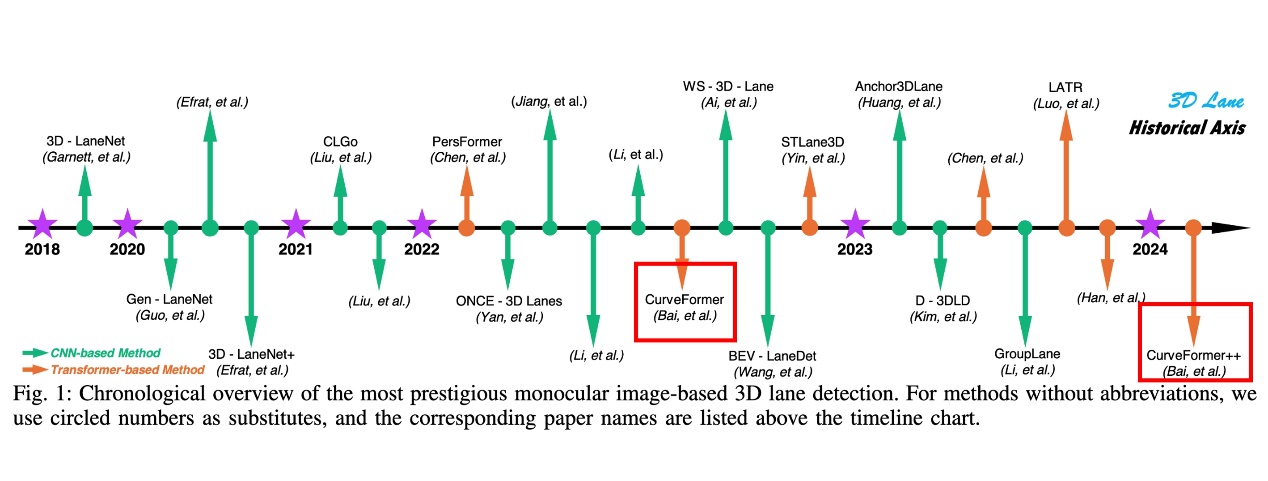
为了推动纯视觉自动驾驶技术的进一步发展,Nullmax纽劢持续加大研发投入,不断探索新技术、新方法。在单目3D车道线检测方面,根据另一篇综述论文《Monocular 3D lane detection for Autonomous Driving: Recent Achievements, Challenges, and Outlooks》的汇总,Nullmax纽劢的CurveFormer同样是领域内最早的开创性工作之一,升级之作CurveFormer++也是今年极具影响力的研究之一。正是通过将这些优秀的算法设计整合到端到端自动驾驶模型中,Nullmax纽劢的纯视觉车辆可以在没有任何地图信息的情况下,通过摄像头实时理解各种场景下的道路结构。
随着技术的不断成熟和市场的逐步拓展,Nullmax纽劢的纯视觉自动驾驶技术可以实现更广泛的普及应用,也可以开启更高的智能上限,为人们带来更加美好的出行体验。
相关文章
- 上海机器视觉2025报名,展会亮点:AI+视觉技术赋能产业升级!
- 解锁无图驾驶新时代,Nullmax纽劢纯视觉技术引领未来出行
- 以机器视觉技术引领工业未来,斑马技术亮相2024中国(上海)机器视觉展 (Vision China 2024)
- 推进计算机视觉技术创新,微美全息研究基于融合图卷积网络的图像融合点云语义分割
- DHL趋势报告:人工智能驱动的计算机视觉技术正对行业产生重要影响
- 迈尔微视MRDVS亮相Vision China深圳展,加速推进3D视觉技术应用
- 推动计算机视觉技术创新,微美全息研究基于语义分割的机器视觉算法
- 视觉技术开启智能家居新时代 萤石网络携新品亮相广州建博会
- 吹响全息视觉技术时代的冲锋号,微美全息3D裸眼光场技术日臻完善
- 问鼎计算摄影的虹软科技,凭借视觉技术能否在智能车载占据鳌头
- 苹果/特斯拉/微美全息等AI视觉技术公司欲打造自动驾驶产业链
- 视觉技术再升级 萤石网络发布扫地机器人/儿童陪护机器人/儿童手表
- 紫光华智与内蒙古联通达成战略合作 共推AI视觉技术创新与普惠应用
- AR技术渲染新年节日氛围,微美全息AR+AI视觉技术助力光场演艺
- 视觉技术与行业Know-How有机结合,闪马智能拓宽视频分析的能力边界
- 让机器理解三维世界,「商汤科技」畅想人工智能3D视觉技术的未来