Nullmax纽劢3D目标检测新研究成果入选CVPR 2024!
2024-06-27 15:53:15爱云资讯70126
在自动驾驶技术迅速发展的今天,Nullmax纽劢再次向世界展示了其卓越的创新能力和技术实力。当地时间6月17日,为期5天在美国西雅图举行的IEEE国际计算机视觉与模式识别会议(CVPR 2024)CVPR(IEEE Conference on Computer Vision and Pattern Recognition)召开。Nullmax纽劢感知部门的3D目标检测研究《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》成功入选CVPR 2024!这份荣誉不仅彰显了Nullmax纽劢在计算机视觉领域的领先地位,也标志着其前沿技术持续获得国际顶级会议的认可。
CVPR被誉为计算机视觉和模式识别领域的顶级会议,迄今已经举办了40次会议。据官方数据表示,本届会议共收到11532篇有效论文投稿,接收了其中2719篇,录用率为23.6%,比例低于往年。其收录的论文代表了计算机视觉领域的最新发展方向和最高研究水平。Nullmax纽劢的研究成果能够在如此严苛的录用标准中脱颖而出,充分展示了其在自动驾驶感知技术领域的领先地位和影响力。
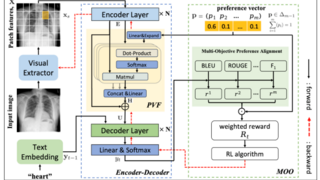
在这篇入选的论文中,Nullmax纽劢提出了一种名为QAF2D(Query Anchor From 2D)的多相机3D目标检测新方法。该方法通过2D检测结果引导生成3D查询锚点(Query Anchor),显著提升了多相机3D目标检测的性能。同时,Nullmax纽劢还利用视觉提示(Visual Prompt)设计了一套两阶段的优化方法,让2D和3D检测器共用图像特征提取网络,有效降低了模型训练和部署的资源消耗。
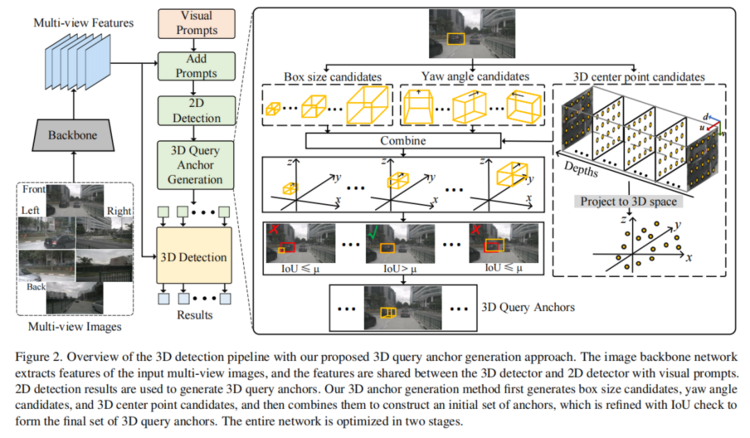
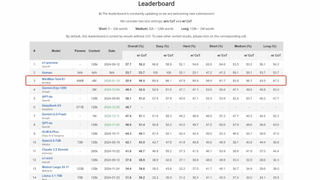
实验结果显示,QAF2D方法在nuScenes数据集上取得了显著的性能提升,平均提升1.18% NDS和1.74% mAP,最大提升达到2.3% NDS和2.7% mAP。这一成果对于提升自动驾驶系统的整体表现,尤其是增强系统驾驶的安全性具有重要意义。将QAF2D应用到实际的量产车型上,有望进一步提升智能驾驶的整体性能,同时降低部署和开发时的硬件资源需求。
作为一家在行业前沿的自动驾驶技术企业,Nullmax纽劢自成立以来一直致力于产品技术开发和量产项目落地。如今,公司正在加速推进量产的同时,不断扩大对新一代技术的研发,以打造更高阶的自动驾驶形态。
Nullmax纽劢在自动驾驶感知技术领域的持续创新和突破,此次论文入选CVPR 2024,再次证明了其技术实力和行业领先地位。Nullmax纽劢坚信,通过不懈的努力和不断的探索,Nullmax纽劢将继续引领自动驾驶技术的发展,为智能驾驶的普及和安全贡献力量。同时,Nullmax纽劢也期待与更多合作伙伴携手共进,共同推动自动驾驶技术的快速发展。
相关文章
- 上海共荣SAT-3D系统:营养实训与慢病改善的革命性突破
- 3D多色打印风靡全球,纵维立方持续深耕国内市场
- Style3D亮相2024 Fashion Summit(HK)
- 上海共荣SAT-3D膳食诊断系统,营养教育中标市场的领跑者
- 上海共荣SAT-3D系统,营养诊断新利器,高校实训争相引入
- 洛微科技重磅亮相CeMAT ASIA 2024,以3D视觉赋能智慧物流
- 2024广交会丨Style3D与合作企业再度受央视关注!
- 正式官宣!AMD锐龙7 9800X3D游戏处理器将于11月7日发布,售价479美元
- AMD下一代 X3D 芯片即将亮相,Google/微美全息积极投身AI算力布局
- 佳能新款经济型3D镜头RF-S7.8mm F4 STM Dual将于11月上市
- 镭神智能机器人3D SLAM无人叉车:消费电子行业降本增效的新利器
- 如CGI一般的分子动力学,让科学家看到了3D渲染后的分子运动「影片」
- Style3D×福壹集团:数字化转型,福壹用3D交出了一份高分答卷
- AMD官宣:锐龙7 9800X3D 11月7日上市 性能大幅提升
- 创想三维在 3D 打印领域持续发力,引领行业发展
- AMD即将停产锐龙7 5800X3D处理器