迈向端到端自动驾驶,地平线正式开源Sparse4D算法
2024-01-23 17:41:23爱云资讯844
1月22日,地平线将业内领先的纯视觉自动驾驶算法——Sparse4D系列算法开源,推动行业更多开发者共同参与到端到端自动驾驶、稀疏感知等前沿技术方向的探索中。目前,Sparse4D算法已在GitHub平台上线,开发者可关注地平线GitHub官方账号“Horizon Robotics”获取源码。
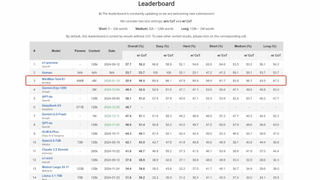
Sparse4D是迈向长时序稀疏化3D目标检测的系列算法,属于时序多视角融合感知技术的范畴。面向稀疏化感知的行业发展趋势,Sparse4D搭建了纯稀疏的融合感知框架,让感知算法效率更高、精度更高,让感知系统更简洁。相比稠密BEV算法,Sparse4D降低了计算复杂度,打破了算力对感知范围的限制,在感知效果和推理速度上,都实现了对稠密BEV算法的超越。在nuScenes纯视觉3D检测和3D跟踪两个榜单上,Sparse4D均位列第一,成为SOTA,领先于包括SOLOFusion、BEVFormer v2和StreamPETR在内的一众最新方法。
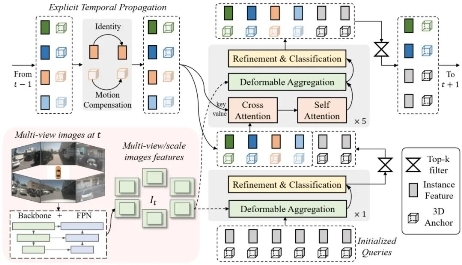
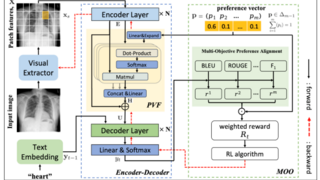
Sparse4D算法架构
历经三版迭代,地平线Sparse4D团队接连攻克了提升稀疏算法性能、降低时序融合计算复杂度、实现端到端目标跟踪等技术难关,于近期发表了论文《Sparse4D v3: Advancing End-to-End 3D Detection and Tracking》。基于地平线业务数据,Sparse4D已完成性能验证,在地平线征程5计算方案上实现了部署。根据规划,Sparse4D将应用于地平线下一代产品中。
地平线副总裁兼软件平台产品线总裁余轶南博士认为:“行业已经进入感知端到端的时代,一个网络即可完成整个感知的任务。Sparse4D系列算法将稀疏类算法的性能提升到了一个新的高度,并实现了端到端的多目标跟踪,无论对于稀疏感知还是端到端自动驾驶都具有里程碑意义。地平线选择将Sparse4D开源给全行业,我们期待与行业的优秀开发者共同进步。”
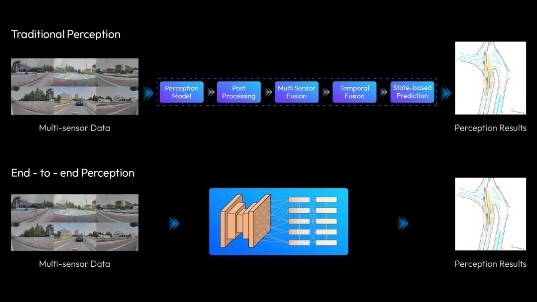
传统感知系统和端到端感知系统的对比
此次Sparse4D系列算法的开源,是地平线积极参与智能驾驶开源软件生态建设的又一范例。在可预见的未来,Sparse4D有望得到行业开发者的广泛应用,极大推进纯视觉、端到端自动驾驶的落地进程。此外,地平线近期还开源了基于矢量化场景表征的端到端自动驾驶算法VAD、端到端矢量地图在线构建方法MapTR等领先技术,持续推动行业加速发展。
让技术的源头活水灌溉智能汽车产业生态的千亩良田,地平线致力于将自主创新的技术、突破性产品与解决方案转化为更多智能汽车产业生态合作伙伴的商业价值,与产业各方紧密协同、开放融合、合作创新。在自动驾驶量产的破局之路上,地平线将继续拥抱开源开放,让前沿技术更快走向量产落地,与行业共赢广阔未来。
相关文章
- 智驾平权“最大公约数”,地平线2024财报增长亮眼
- 中国智驾平权风暴,或起于地平线
- 地平线SuperDrive突破泛化性挑战,将于2025年实现首发量产
- 从软件到硬件,地平线SuperDrive加速全场景智驾普及
- 地平线SuperDrive:能洞悉需求、预测意图的智驾系统才堪称“好用”
- 易航智能陈禹行:“笃行”城市智驾平台,首推地平线J6E方案
- 影驰 RTX 40系显卡:探索 《地平线 西之绝境》DLSS 3的革新
- 《地平线 西之绝境》深度评测!耕升 RTX 40系显卡+DLSS 3带你直面西部荒野!
- 游玩《地平线:西之绝境》首选华硕天选 5 Pro锐龙版 真香入手价 7998元
- 《地平线:西之绝境》上线 华硕主板陪你作战
- 迈向端到端自动驾驶,地平线正式开源Sparse4D算法
- 地平线征程助力智驾先锋起飞,理想汽车月销突破5万辆
- 出货可期 智驾大潮下的地平线与大众合资公司
- 大众合作落定,地平线成为智驾胜负手
- 押宝地平线 大众成立CARIZON合资公司
- 征程6合作博世 地平线再获国际Tier-1巨头青睐