微美全息开发基于神经信号的智能装配引导技术,引领智能装配未来
2023-09-27 11:58:29爱云资讯567
在现代制造业的不断演进中,基于技术创新的智能化方案成为提高生产效率、优化操作流程以及降低人为误差的重要途径。在这个背景下,WIMI微美全息提出基于神经信号的智能装配引导技术,以其前瞻性和实用性成为目标的创新成果。这项技术通过融合脑机接口神经科学和机器人控制,来实现智能装配。
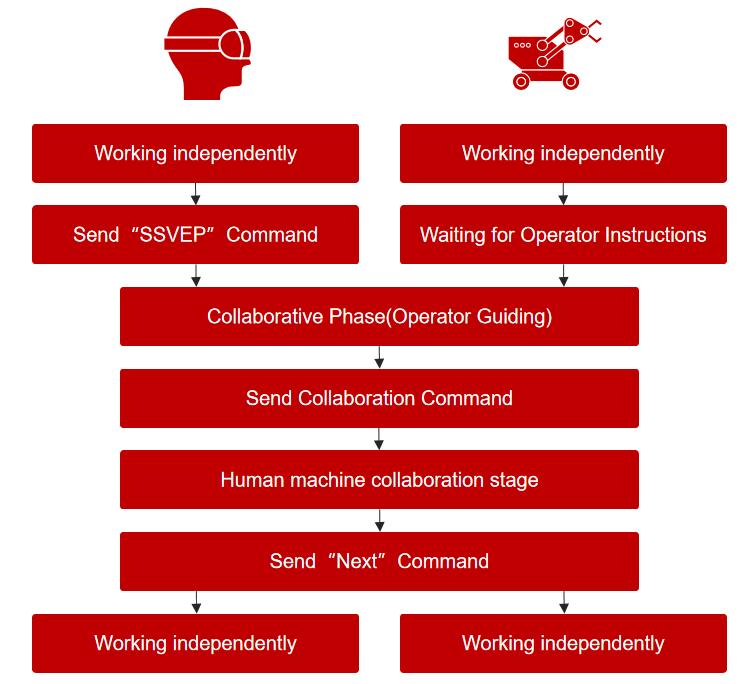
据悉,微美全息(NASDAQ:WIMI)基于神经信号的智能装配引导技术,依托神经信号捕捉和解析,将人类的意图转化为机器人的动作,从而实现智能装配过程的引导和协同。这项技术的关键在于脑机接口技术的应用,特别是稳态视觉诱发电位(SSVEP)方法。操控人员通过观察特定频率的视觉刺激,发出与不同任务模式或指令相关的神经信号。在装配过程中,每个神经信号被分配给预定义的特定机器人功能。操控人员通过切换任务模式的方式,实现了从独立阶段到协同支持阶段的无缝切换。当操控人员需要精确的位置固定或协同操作时,可以通过发送命令消息来激活"保持"或其他相应的引导命令。在完成操作后,"下一步"命令可以将系统恢复到独立阶段,操控人员和机器人继续各自的任务。
WIMI微美全息基于神经信号的智能装配引导技术的核心原理,是将人类的神经信号与机器人的操作紧密联系起来,从而实现智能化的装配引导。以下是该技术的技术逻辑流程:
神经信号采集: 在装配过程开始之前,通过佩戴稳态视觉诱发电位(SSVEP)装置的脑机接口设备,通过向操控人员呈现特定频率的视觉刺激,操控人员只需专注地注视这些刺激。这个过程产生了大脑的特定神经信号,可以被设备捕捉和解析。
信号处理与命令分析: 捕捉到的神经信号会通过信号处理算法进行解析。这些算法会将不同的神经信号与预定义的任务模式或指令相对应。每个任务模式或指令都对应着特定的操作,如移动、固定、切换等。
任务模式切换:通过操控人员注视不同频率的刺激来切换到不同的任务模式,例如独立阶段、支持阶段或其他特定任务。
协同装配引导: 在独立阶段,操控人员和机器人各自独立地进行工作。一旦操控人员需要机器人的协助或精确的位置固定,他们可以发送相应的命令消息。机器人会根据解析的神经信号,执行协同操作或位置固定,实现装配引导。
操作反馈与任务切换: 在完成特定操作后,操控人员可以发送"下一步"命令,将系统恢复到独立阶段。操控人员和机器人继续各自的任务。整个过程是一个连续的循环,可以根据装配过程的需要进行多次任务切换。
通过这种方式,WIMI微美全息基于神经信号的智能装配引导技术,通过脑机接口将操控人员的意图转化为机器人动作,实现了高度协同的操作体验。传统装配过程中,人员需要直接操作机器,但通过这项技术,操控人员可以仅通过神经信号就能精准指导机器人的动作,不仅提高了操作的准确性,还减轻了人体劳动负担。
此外,WIMI微美全息基于神经信号的智能装配引导技术,可以大幅降低特殊行业中的操作风险。 由于操控人员不再需要直接接触装配设备,该技术有效地降低了操作过程中的风险。特别是在一些危险环境下,如有毒有害物质的处理或高温高压环境下的装配,这项技术能够让操控人员远离潜在的危险。
并且可以有效推动企业数字化转型与生产力升级,基于神经信号的智能装配引导技术的应用,不仅实现了人机协同,还在数据采集、分析和迭代改进等方面为数字化转型提供了契机。通过对神经信号和操作数据的分析,企业可以获取更多关于操作过程的信息,从而优化生产流程、提高产品质量。
综上所述,WIMI微美全息基于神经信号的智能装配引导技术,具备诸多独特的优势,这些优势将其应用领域推向了更为广阔的范畴。无论是在制造业、工业智能化、危险行业还是辅助技术中,这项技术都将发挥出强大的作用,引领着智能化的未来。将为不同领域的发展注入新的活力,随着技术的不断完善和推广,有理由相信,基于神经信号的智能装配引导技术将为社会带来更多令人振奋的变革和进步。
相关文章
- 百度发布文心4.5与X1大模型,微美全息软硬协同算力生态树立AI典范
- 英伟达首个“量子日”重磅来袭,微美全息多路径量子技术激活应用生态
- 量子科技驱动新质生产力跃升,微美全息AI+量子计算研究获关注
- 2025脑机接口应用爆发之年,微美全息加速布局抢占未来发展先机
- Meta革新虚拟人生成效率,微美全息协同DeepSeek数字人应用
- 深圳印发重磅新政《行动计划》,三星/腾讯/微美全息强化AI优势构筑护城河
- Meta新一代Aria Gen 2 发布,微美全息巩固技术护城河角逐AI+AR眼镜赛道
- 5G领航MWC世界移动通信大会,高通/微美全息持续引领5G+AI融合创新潮流
- 亚马逊首款量子计算芯片Ocelot亮相,微软/谷歌/微美全息竞逐加速量子行业成熟
- 人形机器人浪潮催生行业“鲇鱼效应”,小鹏/小米/微美全息技术革新跨界博弈
- 阿里开源模型万相2.1引爆视频赛道!谷歌/微美全息加入全模态AI开源新时代!
- 2025 GDC大会AI应用成亮点,微美全息多模态AI开源探索未来
- 人形机器人产业政策催化驱动,微美全息具身智能+开放生态抢占AI技术制高点
- 苹果加快引爆技术竞赛新格局,百度/微美全息DeepSeek开源生态重构商业版图
- DeepSeek大模型引领算力新趋势,微美全息AI算法筑牢高性能底座根基
- 马斯克加速人形机器人量产,微美全息打造DeepSeek+机器人领航未来