外媒消息:约翰内斯·开普勒大学研究人员研发捕蝇机器人
2020-10-08 08:48:05爱云资讯879
马丁·卡尔滕布伦纳(Martin Kaltenbrunner)说,当我们想象移动的机器(例如机器人)时,我们想象的东西很大程度上是由硬质材料制成的。他和JKU的软物质物理系以及LIT软材料实验室的研究人员一直在努力构建基于软材料的系统。创建此类系统时,存在一个基本的基本概念,即创建有利条件,以支持将来机器人与人之间的紧密交互,而不会造成坚固的机器对人的身体造成伤害。
稳定,可拉伸且灵活
6月,科学家提出了一种用于电磁电动机的新方法。代替铜线和铁,弹性材料和液体金属现在形成用于所谓的致动器的基本成分。科学家最近还在《自然材料》杂志的一篇文章中介绍了一种新型的生物凝胶,该凝胶具有足够的弹性,柔韧性和稳定性,可以与电子组件结合使用,从而创造出一种“软机器人”。
由Kaltenbrunner和Denys
Makarov(位于德累斯顿-罗森多夫的亥姆霍兹中心)领导的团队现在正在进一步开发这类机器。两位研究人员指出,以前的缺点是这些无线设计的软机器人只能非常缓慢地改变形状。他们的新想法是基于使用柔性塑料聚二甲基硅氧烷并混合磁性微粒(例如钕,铁和硼的合金)。
花形机器人会在捕捉苍蝇之前暂时关闭苍蝇,然后通过在面内方波磁场(3
mT,50 Hz)驱动下打开八个臂来释放苍蝇。机械手的直径为25 mm,厚度为200
m。图片来源:Makarov等;通讯材料六臂机器人可以抓取,运输和释放非磁性物体,例如由永磁体控制的聚氨酯泡沫立方体。机械手的直径为20
mm,厚度为80 m。
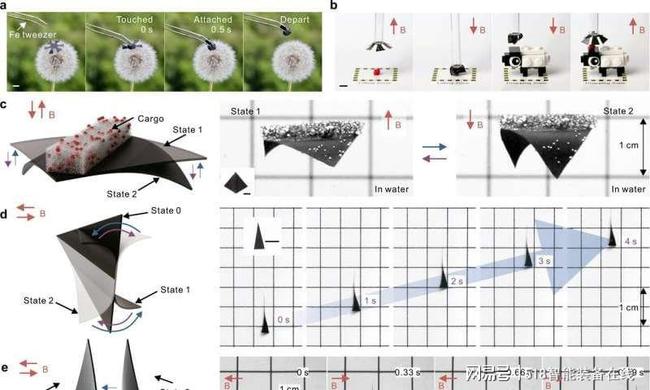
通讯材料一个四臂机器人(重量为23 mg)位于透明玻璃管中,并通过3.7 mT的平面外静态磁场使其悬浮。悬浮时,机器人被制动。当暴露于平面内方波磁场(1.5 mT,50 Hz)时,它会在空间上变形并自我配置。机械手的直径为15 mm,厚度为200 m。
研究人员给他们的小型,柔软的机器人不同的形状。根据形状,微粒放置的位置以及所用材料的厚度,当机器人暴露在环境中变化的磁场中时,它们能够以不同的方式移动。这些执行器的厚度只有几微米,重量只有几微克,因此移动所需的能量很小。此外,这些组件可以重复运动数百万次,而无需任何更改。
悬停,游泳,捉苍蝇
通过影响和改变磁场,Kaltenbrunner和他的同事成功地制造了微型机器人,它们可以盘旋,游泳和(从广义上来说)甚至可以行走。他们还表明,在短短的几毫秒内,他们的花形机器人可以捕捉到落在上面的苍蝇。
通过仿真设计,装有货物的蝠ta形机器人可以在交变面内方波磁场(2
mT,1 Hz)驱动的水中游泳。机械手的横向尺寸为17 mm×19 mm,厚度为80
m。图片来源:Makarov等;通讯材料三角形的机器人可以在空中高速滚动,并在暴露于交体地面内方波磁场(3.5 mT,1.5
Hz)的情况下向前行走。机械手的直径为18 mm,厚度为80 m。图片来源:Makarov等;通讯材料
科学家们说,这现在为开发也可以快速移动的软机器人提供了新的机会。长远的想法是主要生产更复杂的微型机器,例如,这些微型机器可以帮助疏通人体中的血管。为了做到这一点,所使用的材料必须是可生物降解的并且易于控制。
相关文章
- 欧洲手术台上的中国方案:术锐®机器人开启中国原创技术全球输出新纪元
- 【预登记从速】NEPCON China 2025上海世博展览馆4月22-24日邀您共探人形机器人、AI、汽车电子、低空飞行、半导体、新能源各大亮点展区
- 2025中关村论坛|云迹科技出席京港科技创新论坛,与香港诺达机器人签署战略合作协议
- 均胜电子聚焦经营质量提升,“汽车+机器人”双线布局建新增长曲线
- 人形机器人产业爆发在即,NEPCON China 2025首设人形机器人核心零部件拆解区,解锁万亿市场新机遇
- 擎朗智能发布首款人形具身服务机器人XMAN-R1,以岗位力推动具身智能机器人商业化落地
- 魔法原子“千景共创计划”再下一城:人形机器人小麦成为全球首个音乐节服务机器人
- 优艾智合-西安交大具身智能机器人研究院公布人形机器人矩阵
- 云迹科技与奇安信达成战略合作 共筑机器人服务智能体安全防线
- 普渡机器人发布全球首款商用类人形具身智能服务机器人闪电匣Arm
- 家电圈神仙组合!宇树网红机器人x松下最美洗衣机的双向奔赴
- 达明机器人携合作伙伴亮相上海三展,以科技赋能智能制造升级
- AI保保重构保险销售新范式:首个可面客智能销售机器人AI保保面世
- 智能打磨机器人技术突破,破解汽车模具行业难题
- 人形机器人场景落地持续加速 魔法原子总裁吴长征:出货量有望达400台
- 云迹科技机器人服务智能体落地锦江集团多家酒店 提升用户体验