福特发布自动驾驶汽车数据集 迄今为止最为全面
2020-03-28 10:10:07爱云资讯765

据外媒报道,福特近日在官网上线了一个语料库Ford Autonomous Vehicle Dataset(福特自动驾驶汽车数据集),该数据集包含了2017~2018两年间的自动驾驶车队在密歇根州的路测数据,总大小1.6TB。福特将该数据集免费提供给研究人员,用于提高自动驾驶汽车在城市环境中的适应性。
这一数据集或许不是时长跨度最大的数据集,也或许不是场景最为丰富的数据集,但可能是数据最全的数据集之一。
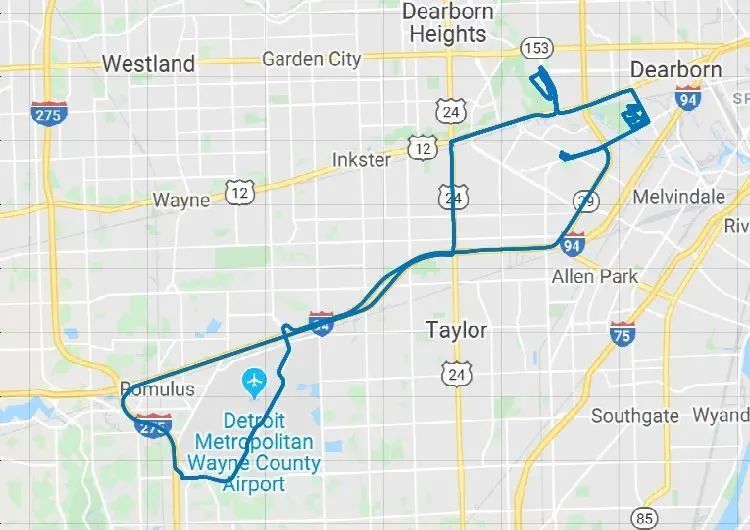
工程师们为了创建数据集,驾驶了一辆配备四核英特尔i7处理器、16GB内存的14年款福特Fusion混合动力车辆,行经至底特律大都会机场、密歇根大学迪尔伯恩分校、高速公路、市中心和郊区等地区共行驶了约66公里。汽车在行驶过程中,通过细微调整路线来捕捉多样化的数据,这些数据主要来自于4个激光雷达传感器、6个130万像素的摄像头和1个5百万像素摄像头,以及1个惯性测量单元。
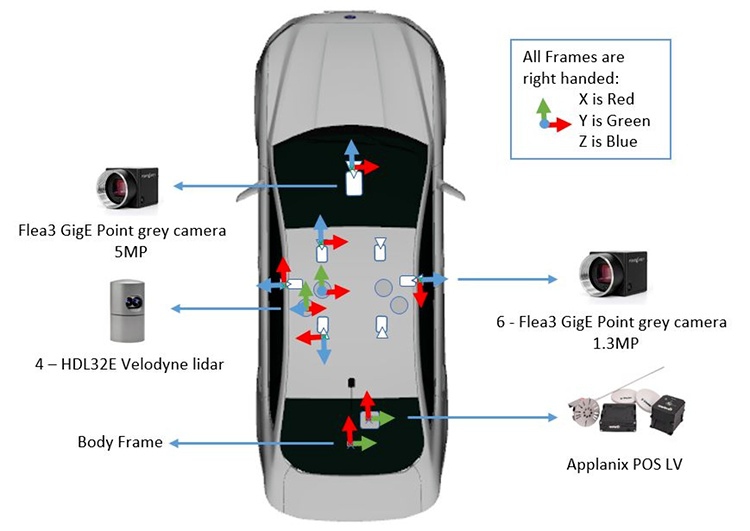
这辆车的所有传感器都被策略性地放置在车辆中的各个部位。每辆车都配备了4个Velodyne HDL-32E激光雷达(Velodyne 2011),7个Grey 1.3 MP相机,前方一个5 MP行车记录仪,结合了差分GPS和IMU的Applanix POS-LV定位产品。汽车后备箱用于安装四个具有16 GB Ram的四核i7处理器,联网设备和冷却机制。
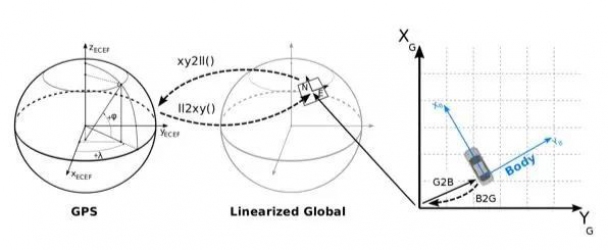
据福特官网介绍,每个传感器都经过了严格的校准。在该数据集中使用的坐标框架包括传感器框架,主体框架,局部框架,GPS框架和全局框架。
福特研究人员通过传感器会生成地图和行人姿态数据,如3D地面反射率地图、3D点云图、六自由度地面真实姿态,以及本地化姿态传感器数据。这些数据是在晴朗、下雪和多云等天气情况下采集而来,可以真实反映出季节变化所带来的影响,覆盖了一系列真实驾驶环境,如立交桥、桥梁、隧道等,以及建筑区域和不同植被覆盖的区域。

福特自动车辆的这些数据集中的每个日志都带有时间戳,包含来自传感器的原始数据、校准值、姿态轨迹、地面真实姿态和3D地图。这些数据集也支持ROS包文件格式,能够使用开源机器人操作系统(ROS)对这些数据进行可视化展示、修改和应用等处理。
研究人员表示,“这些数据集可以为改进与多智能体自动系统相关的机器人算法提供基础,并使其在季节和城市环境变化时更稳健。我们希望这些数据集有助于机器人和AI社区研究,并为自动驾驶提供新的研究机会。”
福特发布数据集之前,Waymo也更新过类似语料库Waymo Open Dataset ,Lyft也为自动驾驶汽车开发开源了数据集。其他类似语料库还有nuScenes、Mapillary Vistas的街道级图像语料库、加拿大不利驾驶条件(CADC)、KITTI移动机器人和自动驾驶研究数据集,以及由戴姆勒、马克斯·普朗克信息学研究所(Max Planck Institute for Informatics)和达姆施塔特工大视觉推理小组(TU Darmstadt Visual Inference Group)开发和维护的Cityscapes数据集。
2019年3月,福特表示将建造一家专门生产自动驾驶汽车的新工厂,作为对密歇根制造基地9亿美元投资的一部分。去年7月,福特透露,将在底特律单独成立一个价值40亿美元的部门,为其自动驾驶车队提供研究、工程、系统集成、商业战略和业务开发支持。
最近,福特还收购了自动驾驶系统开发商Quantum Signal,以加强其无人驾驶汽车的研发工作,并与总部位于匹兹堡的Argo AI公司建立了密切的合作关系,承诺在未来五年内向该公司投资10亿美元。
总结下来,福特这次开源的数据集优点,在于多车辆主体、多季节环境以及包括城市环境跟3D地图的数据集,并且还可以在ROS集成。
相关文章
- 西班牙首个前装量产自动驾驶试运营服务,文远知行驶入巴塞罗那市中心
- 曼孚科技荣登创业邦2025自动驾驶数据标注企业TOP1
- 自动驾驶浪潮汹涌,英伟达/微美全息AI大模型赋能加速智能化变革步伐
- 欧洲首个机场自动驾驶商业项目,文远小巴驶入瑞士苏黎世机场
- 唯一上榜L4级自动驾驶公司,文远知行量产ADAS方案入选「2024年度十大智能车技术方案」
- 乾瞻科技全新汽车IP解决方案亮相,助力智能车辆与自动驾驶应用
- 文远小巴驶入广州中心城区,天河段BRT自动驾驶便民线正式开通
- Waymo自动驾驶汽车将要在日本进行国际公路测试
- 全球Robotaxi第一股文远知行成北京高级别自动驾驶示范区创新切片
- 全球Robotaxi第一股文远知行荣登《财富》未来50强榜单,彰显自动驾驶长期增长潜力
- 自动驾驶仍充满不确定,“Robotaxi第二股”小马智行能否冲出重围
- 小马智行正式成为全球Robotaxi第一股!系年内美股自动驾驶最大IPO!
- 文远知行韩旭收获福布斯出海领军人物奖,开拓全球自动驾驶“大航海时代”
- 沙利文最新报告:华为云位居汽车大模型市场领导者象限,加速自动驾驶落地
- 仙途智能亮相车联网产业发展高峰论坛,以新质生产力引领自动驾驶发展新篇章
- 出海提速,文远知行在新加坡连获两款自动驾驶环卫产品许可证