首次公开,云深处实现机器狗在未知环境下的全自主协同搜索
2022-10-13 09:51:12AI云资讯1216
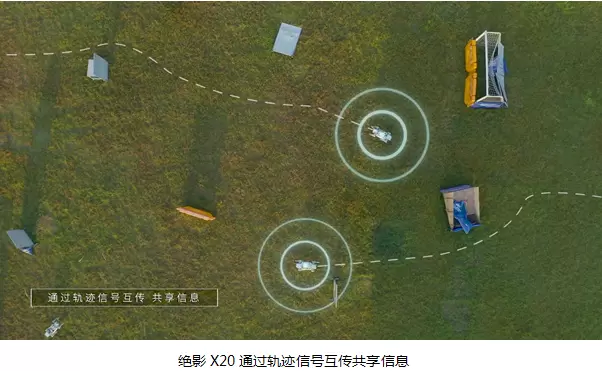
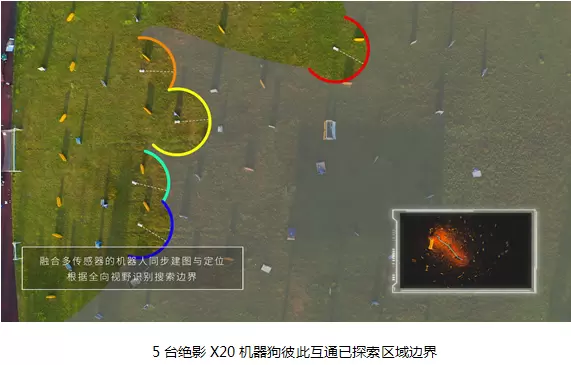
云深处科技首次公布其对绝影X20的全自主协同搜索测试:5台绝影X20四足机器人在3,000平米未知环境下,成功完成对8个模拟目标的协同搜索,整个过程由绝影X20全自主决策与规划,将进一步拓展机器狗在应急救援与勘测探索等场景中的应用潜力。

在应急救援与勘测探索中,人工开展相关作业常面临信息采集不足等问题,工作人员也可能面临缺氧、有毒有害气体、塌方等人身安全威胁。四足机器人能够替代或辅助工作人员先行进入高危场景,深入传统轮式或履带机器人较难进入的复杂地形;四足机器人集群协同,则实现了多台机器狗之间的搜索信息与路径共享,大大提升了未知环境中的搜索速度与效率。

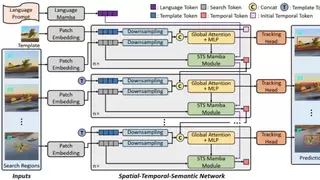
未知环境下的自主搜索是全球机器人研究的前沿领域,其难度与技术含量并不是固定动作群控或“机器人集体舞”所能比较的。此次测试中,绝影四足机器人搭载了高清全景摄像机,激光雷达以及自组网通信设备。通过激光同步建图与定位算法,对未知环境进行建图;利用全景相机进行深度学习目标识别;多台机器狗通过高效的协同机制,实时自主分配探索地域目标,在探索过程中,机器人自主规划路线并实现避障,最终完成大范围未知区域的集群探索与目标识别。
云深处科技感知算法主管唐威介绍:先进的集群协同算法是绝影X20之间协同高效完成搜索工作的重要关键。通过提取最简洁的有效信息进行通信共享,可大大减少多机器人之间通信带宽需求,增强系统在通信局限的环境中的适用性。相关文章已发表在2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR2022)。
云深处科技(DEEP Robotics)是全球四足机器人行业应用引领者,在先进运动控制算法、环境感知及AI算法等领域处于国际前沿,其自主研发的“绝影”系列机器人已在电力巡检、公共救援、勘测探索等多种应用环境中落地推广。除机器狗多狗协同外,云深处科技也在同浙江大学湖州研究院等合作伙伴一同探索不同类型机器人的协同作业,此前双方就在湖州黄龙洞尝试了四足机器人与空中机器人在地下空间的“机狗协同”。
相关文章
- 2026届校园招聘大战启幕 科技企业派机器狗进高校抢人
- 智能“机器狗”亮相广博会 视源股份四足机器人提供展会、赛事安保新思路
- “未来家庭智能体BAOBAO”全球首秀! 镜识科技携三款尖端机器狗亮相2025世界机器人博览会
- 机器狗要“进化”了!宇视×云深处×小远三方达成战略合作
- 蔚蓝科技发布全球首款多模态交互机器狗,加码人形机器人
- 波士顿动力公司与亚萨合莱合作,机器狗将要抢保安的饭碗了
- 宇树机器狗B2助力北京电力隧道,实现无人化智能巡检
- 人工智能助力行业数字化融合,云深处机器狗26省市正式上岗
- Unitree B2:宇树电力巡检四足机器狗助力电力行业智能化升级
- 云深处发布行业应用旗舰机器狗绝影X30
- 云深处与昇腾CANN联合开展ROS四足机器狗开发训练营
- 宇树应急救援机器狗B1,赋能消防行业
- 《流浪地球2》机器狗并非遥不可及 这些前沿黑科技在京东都能买到
- 首次公开,云深处实现机器狗在未知环境下的全自主协同搜索
- 云深处发布“绝影X20-消防侦察机器狗”解决方案,跨越险阻,抗灾救援
- 从实验室到日常生活,机器狗还要走多久