优刻得UCloud为同济大学L4级智能无人车实验室提供云底座
2021-04-28 05:39:10爱云资讯756
车水马龙的道路上,各种车辆交错汇聚,各种道路状况频出。从行驶缓慢的环卫车到疾驶抢道的出租车、因施工临时封闭的道路、突发的交通事故现场。作为路面上的车辆,是互不相让,还是借道通过,又或者是重新规划路线,到达目的地?这一切都考验着“驾驶者”的应变力及现场决策力。
这是去年11月在上海举行的中国智能车未来挑战赛的比赛场景:无人车与人类驾驶的车辆同场竞技,以应对真实交通环境下的种种考验,以证明其自主行驶的能力。在这场比赛中,同济大学“途灵TiEV”智能无人车成功完成了重新规划路线避开拥堵路段,遭遇缓慢行驶车辆的择机超车,以及在封锁路段旁的借道行驶等几项闯关考试,取得佳绩。

同济大学“途灵TiEV”智能无人车实验室创立于2015年,隶属于同济大学嵌入式系统与服务计算教育部重点实验室。6年来,“途灵TiEV”智能无人车实验室一直致力于研发L4级全自动驾驶系统。2018年,“途灵TiEV”智能无人车实验室与UCloud优刻得合作,将车智能的核心“驾驶脑”的训练搬上云端,推动智能无人车研发进入新阶段。
“驾驶脑”的三道难题
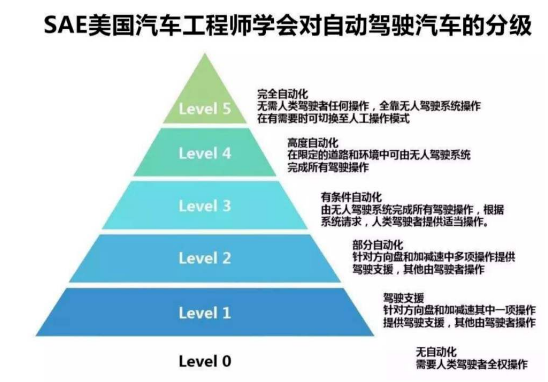
从特斯拉到百度Robot-Taxi,自动驾驶车不断走进大众视野,但真正达到“自动驾驶”级的车辆并不多,按照自动驾驶汽车级别划分的标准,大家耳熟能详的特斯拉处于L2级——自动辅助驾驶系统,奥迪A8搭载的是L3级辅助自动驾驶;而百度自动驾驶出租车Robot-Taxi是少数投产的L4级全自动驾驶车辆,但目前只能在特定区域内行驶。
要真正实现L4自动驾驶“自由”,关键在于指挥中枢“驾驶脑”的智能程度。目前,同济大学“途灵TiEV”智能无人车实验室正在攻克的课题就是提高L4级自动驾驶技术突破环境局限的能力,这种突破需要将驾驶脑放置在仿真模拟场景下进行大量的极限训练。比如,在夜间隧道行驶,测试自动驾驶车辆能否通过调用多线激光雷达、多线摄像头,毫米微波雷达来识别周围行驶的车辆、行人,并精准判断自己与他们之间的距离,做到及时避让;或者,在信号不好的过江隧道里,自动驾驶汽车能否通过云端传输,顺利定位隧道出口的位置,远程规划行驶方向等等,让驾驶脑在严格的环境考验下“学习成长”。
“驾驶脑的训练,需要解决三个核心问题:我在哪?我要去哪?我怎么去?即自主定位,动态路线规划,及障碍规避。”据“途灵TiEV”智能无人车实验室的相关负责人叶晨介绍,只有 “驾驶脑”具备了真实环境下的感知力和应变力,才能真正实现自动驾驶的安全性和舒适性。这离不开海量路况数据支撑下数以万计的训练。
上云助力“驾驶脑”成长
2018年,同济大学与UCloud优刻得合作,将驾驶脑的学习和训练放到云上。从基础路况数据搜集、在线模拟训练,到上路测试,云都在发挥重要作用。
“途灵TiEV”智能无人车实验室启用云端导航服务器,实时同步其他机构发布的交通流信息,充实无人车训练时所需要的基础路况信息数据库。一旦掌握足够数量的路况信息,驾驶脑可进行行驶轨迹、路况障碍,以及潜在事故风险分析和预判,不断进化。比如,识别路口的红绿灯指示,从单纯的竖放红绿灯,到横放红绿灯,再到有树木遮挡的红绿灯,驾驶脑只有通过不断的识别、认知和学习,才能将不同形态的红绿灯统一“标注”为“红绿灯”,正确决策行驶路径。
上路测试中,云也在发挥积极作用。在路线规划阶段,驾驶脑的工作分为全局规划导航和局部路径规划。全局规划导航,在提前确认的起点和终点之间规划行驶路径;局部路径规划,即在行驶过程中,针对动态特殊路况,进行即时判断和决策。前者可以依靠云上大数据进行规划,后者则依靠本地计算进行实时动态决策。通过云+本地计算互相配合,以及长途+短途规划相结合,提高驾驶脑的运行效率和决策的精准性。
目前,在“途灵TiEV”智能无人车仿真实验中,庞大的数据运转和计算都建立在UCloud优刻得提供的快杰云主机和GPU云服务器基础上,确保“驾驶脑”实现各种极限环境下的高强度训练。
在同济大学无人车实验室相关负责人叶晨看来,云是支持自动驾驶进行高强度仿真训练的基础技术,帮助提高自动驾驶应对复杂路况的能力。未来随着5G发展,“驾驶脑”可获取的技术支持也会更多元,这都能帮助自动驾驶技术发展成熟,向真正全自动无人驾驶的未来不断迈进。
相关文章
- 首发!优刻得云平台上新DeepSeek-V3-0324模型
- 开箱即用的DeepSeek大模型应用:优刻得以AI赋能医药健康行业
- 优刻得成都AI专题分享会圆满收官:DeepSeek赋能千行百业,企业争相布局智能化转型
- 优刻得与数道智算达成智算中心战略合作
- 优刻得安全屋+DeepSeek:解锁数据安全流通与AI赋能的创新场景
- 优刻得×DeepWisdom:无需邀请码!云端极速体验OpenManus
- 全面支持企业知识库和联网搜索,优刻得DeepSeek一体机驱动模型业务深度融合
- 优刻得正式发布DeepSeek优智推理一体机
- 优刻得率先完成基于华为昇腾国产芯片的DeepSeek模型适配
- 重磅上线!优刻得DeepSeek大模型一体机来了
- DeepSeek爆火引发“算力焦虑“!优刻得专有云助您抢占大模型风口!
- 优刻得基于国产芯片适配DeepSeek全系列模型
- 优刻得上线数仓解决方案,打造企业高效决策新引擎
- 重大突破!优刻得×脑虎科技脑机接口临床试验取得新进展
- 优刻得模型服务平台UModelVerse全新升级
- 优刻得X有元人科技:用AI定义引流神器!