DeepMind研究人员研发出了一种解决机器人控制问题的混合方案
2020-01-10 13:21:04AI云资讯988
机器人技术的基本问题既涉及离散变量(比如控制模式或齿轮切换的选择),又涉及连续变量(比如速度设定点和控制增益)。通常来说,由于算法或控制策略并不总是适合的,因此这些问题很难解决。这就是为什么谷歌母公司Alphabet的DeepMind的研究人员最近提出了一种技术:连续-离散混合学习,即可以同时优化离散和连续动作,以其本来的形式处理混合问题。
在预印本服务器Arxiv.org上发表的一篇论文详细介绍了他们的工作,这篇论文也在去年10月日本大阪的第三届机器人学习会议上被人接受。作者写道:“许多先进的方法都进行了优化,它们能很好处理离散的或是连续的动作空间,但是却很少有方法能同时处理。能够使用同一算法强大地处理离散和连续动作空间,使我们能够针对任何给定问题都能选择最自然的解决方案策略,而不是让算法上的便利性来决定做出哪种选择。”
团队研发的无模型算法,是指利用强化学习或者奖励实现目标的自主代理人的培训技术,通过连续和离散动作空间来解决控制问题,并通过受控和自主切换来解决混合最优控制问题。此外,这种算法通过使用“元动作”或其他类似方案来扩大动作空间(分别定义了代理人可能感知和采取的状态和动作的范围),从而为解决现有的机器人问题提供了新颖的解决方案,并使策略可以解决类似人工智能训练期间的机械磨损等挑战 。
来源:DeepMind
DeepMind机器人技术
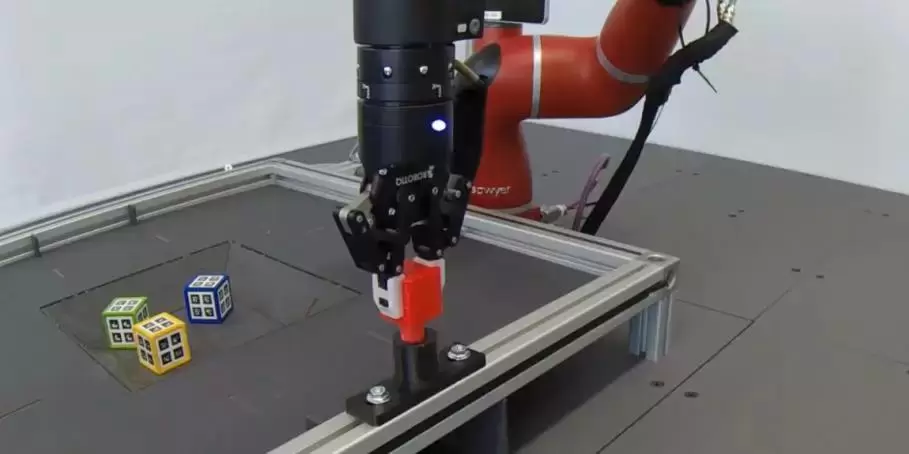
研究人员在一系列模拟和现实基准测试中验证了他们的方法,包括Rethink Robotics公司的Sawyer机器人手臂。据称,基于给定的到达、抓取和拿起魔方的任务,其中奖励是三个子任务的总和,因此他们的算法要优于无法解决任务的现有方法。
那是因为到达魔方需要代理人打开手臂的抓具,而抓取方块需要关闭抓具。作者写道:“一开始,基线将大部分概率集中在较小的动作值上,因此很难移动抓具的手指来看到任何奖励,从而解释了学习曲线上的平稳期。另一方面,这个算法能始终以全速操作抓具,因此改进了探查性,使机器人可以完全完成任务。”
在一个单独的实验中,团队将其算法设置为参数化动作空间马尔可夫决策过程(PAMDP)或一个分层问题,其中,代理人首先选择离散动作,然后为该动作选择一组连续的参数集。在这种情况下,代理人的任务是操纵机器人手臂,以便将钉子插入孔中,然后根据孔的位置和运动学来计算奖励。
研究人员表示,他们的方法比精细方法和粗略方法获得了更大的回报,并且这种算法将来可以作为基础应用到更多的混合强化学习中。论文中写道:“对于专业设计师而言,事先选择合适的模式可能很困难。而我们的方法是很有用的,因为它只需要一个实验,而别的方法都需要通过消融来进行验证。”
相关文章
- 运控+机器人双擎发力 新时达赋能半导体3C高端制造破局
- 从能源、制造到机器人产业,京东AI采购管家助力AI应用规模化落地
- 为超百家具身智能企业提供核心零部件,「知行机器人」连续完成两轮近亿元融资
- 卓特视觉AI视觉赋能,共筑家用服务机器人新生态
- 苹果或将允许用户选择人工智能聊天机器人接入Siri
- 速腾聚创机器人暴涨25倍 激光雷达行业迎来龙头换位
- SEVENS赛文思丨庭院场景革命:泳池机器人品牌出海的战略新范式
- 从全球首创技术到销量全面爆发!MOVA割草机器人登顶全球市场
- 机器人定义零售新体验!极智嘉机器人亮相全球首场AI驱动的时装大秀
- 全球第一!宇树科技四足 + 人形机器人量产规模双领跑
- 多伦科技携手众擎机器人布局智慧警务新赛道,“擎安机器人”落子南京建邺
- 淡马锡与金沙江齐押注水下space X,世航智能正引爆海洋机器人热潮
- “两轮特斯拉”OMOWAY官宣机器人架构,多用途轮式机器人亮相
- 从硬件集成到软核共研,科大讯飞与北京人形机器人创新中心深化合作
- 宇树科技人形机器人全球出货量第一,中国企业表现突出
- 联通数科参编国家首批人形机器人技术标准!