摆脱人为控制 思岚科技Apollo助力机器人智能行走
2019-07-08 15:11:04爱云资讯1055
在服务机器人中会涉及到语音识别、语义解析及交互、运动技术、控制技术、电机及舵机、导航及定位等多种技术,导航及定位作为整个机器人产品中门槛最高的一块,普通机器人企业基本难以下手,他们更希望能有直接提供成熟的自主行走解决方案的企业,从而将有限的资源和时间用在机器人的外型、交互等其他技术上。
在机器人自主定位导航领域,已有多年研发及实践经验的思岚科技,为帮助机器人解决自主行走难题,已相继推出激光雷达(机器人的“眼睛”)、模块化定位导航系统(机器人的“小脑”)及机器人底盘(机器人“双足”)三大核心产品,可一站式解决机器人自主行走难题。

机器人底盘是实现机器人自主行走最直接的方式,可大大降低企业的研发成本,目前市面上的移动底盘主要有轮式及履带式之分,但应用于服务机器人上主要还是以轮式底盘为主,思岚科技的机器人底盘Apollo就是基于轮式结构而研发的。
Apollo是思岚科技推出的中小型机器人开发平台,内置思岚科技自主研发的高性能激光SLAM技术,在未知环境中可实时提供定位,无需预先探明地图,采用D*动态即时路径规划算法,可自动搜索前往目标的最短路径并控制宿主行动。
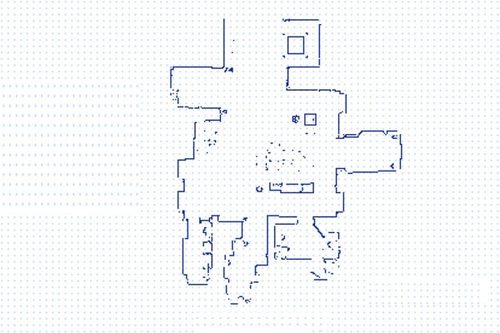
拥有激光SLAM技术的Apollo,无需对环境进行修改,即可在未知场景中完成实时定位并测绘高精度地图,采用SharpEdgeTM精细化构图技术构建高精度、厘米级别地图,超高分辨率,不存在累加误差。同时,构建的地图规则、精细,直接使用,无需二次优化修饰,直接满足使用预期。即时在复杂多变的场景下行走,Apollo移动底盘也能实时识别环境中的人或其他障碍物,并做到灵活规避和路线规划。
此外,Apollo移动底盘还配备了超声波、防跌落、深度摄像头等多种传感器,利用激光雷达传感器可时刻扫描周围环境,提供地图数据,构建精度高达5cm的地图,并基于该地图数据实现自主路径规划及导航功能;遇到玻璃、镜面等高透材质障碍物时,超声波传感器能让Apollo机器人移动底盘及时识别、避让;深度摄像头传感器则可侦测到位于雷达扫描平面上方的障碍物,并及时发送信号进行规避;而防跌落传感器可帮助Apollo机器人移动底盘全方位侦察周围的工作环境,判断工作区域是否存在边界、台阶、坡度等情况,从而发送信号请求机器人移动底盘改变前进方便,避免跌落。

除了以上核心功能外, Apollo还可进行虚拟墙&虚拟轨道设置,基于纯软件方式进行操作,无需额外辅助铺设,即可对Apollo进行活动范围及行走路线设置。同时支持自主返回充电、云端远程管理及提供外扩硬件支持等。
另外,Apollo机器人移动底盘的扩展接口还集成了网口,供电接口和各种控制接口以便用户快速进行开发扩展。可通过有线网络或WIFI与外部通信,本身自带的电池可以为自身与外接的扩展模块供电,用户可以通过各种控制接口对整个Apollo及其上层扩展模块进行控制。
目前,基于Apollo移动底盘的机器人已广泛应用于商场、餐厅、超市、医院、酒店等服务场所,无需外部环境调整及人为编程设置,依靠其内置的高性能激光SLAM导航技术,即可帮助机器人实现智能行走。
相关文章
- 思岚科技闪耀WAIC盛会:用“空间感知”领航机器人具身时代
- 思岚科技陈士凯:用空间感知技术赋予智能机器人行业无限可能
- 思岚科技推出集SLAM定位和建图和九轴IMU于一体的解决方案,赋能全场景机器人
- 三驾马车并头齐驱,思岚科技赋能机器人自主定位导航
- 创新不止,载誉而归 | 思岚科技荣获“中国机器人传感器创新应用奖”
- 思岚科技发布最新SLAM定位建图解决方案—— SLAMKit
- 思岚科技激光雷达赋能清洁机器人,助力商扫行业降本增效
- WAIC | 思岚科技三驾马车并驾齐驱,助力机器人自主行走
- 思岚科技荣获2022年度中国高科技 “智能制造高成长企业奖”
- 不被定义,思岚科技机器人底盘的百变扩展可能!
- 思岚科技:用智能机器人缓解人力缺口,我们有这些技术
- 思岚科技受邀参加“应急+智能机器人”产业促进交流活动,共讨“机器人+”发展
- 思岚科技:多技术协同,赋能消毒机器人
- 思岚科技亮相消费者科技及创新展 展示智能移动机器人解决方案
- 思岚科技成功入选“2020中国人工智能商业落地价值潜力100强”
- 思岚科技是如何攻克机器人智能行走难题 成为业内佼佼者