vSLAM技术爆发期来临,小觅智能如何突破技术瓶颈?
2019-04-28 13:47:13AI云资讯1319
广州白云机场引入智能机器人用于导引乘客,阿里发布“太空梭”机器人用于医院投放药品,日本运营机器人酒店,随着越来越多的服务机器人逐渐进入我们的视野,不由想象,服务型机器人在未来将扮演一个什么样的角色?
整体市场环境分析
一.全球整体市场快速增长,服务机器人迎来发展黄金时代
《 2017 中国机器人产业发展报告》指出,当前,全球机器人市场规模持续扩大,工业、特种机器人市场增速稳定,服务机器人增速突出。 预计 2018 年,全球机器人市场规模将达到 298.2 亿美元, 2013-2018 年的平均增长率约为 15.1%。其中,工业机器人 168.2 亿美元,服务机器人 92.5 亿美元,特种机器人 37.5 亿美元。
二.新一代人工智能兴起,行业迎来快速发展新机遇
据普华永道会计师事务所发布的最新报告显示,人工智能将刺激全球经济增长 15.7 万亿美元。到 2030 年,人工智能将大量用于提高劳动生产率,消费者对技术产品的需求也将增加,全球 GDP 将增长 14% ,其中中国 GDP 增长 26% 。与此同时,依托人工智能技术,智能公共服务机器人应用场景和服务模式正不断拓展,带动服务机器人市场规模高速增长。
科技部印发《服务机器人科技发展“十二五”专项规划》,明确了要着力突破制约我国服务机器人技术和产业发展的关键技术,不断推出更具应用价值和市场前景的产品,积极探索新的投融资模式和商业模式,努力打造若干龙头企业,把服务机器人产业培育成我国未来战略性新兴产业。
三.人口老龄化加剧,催生服务机器人市场需求
中国 60 岁以上老年人口占总人口的比例已达 16% ,按照国际通行标准,中国已然跨入了老龄化社会的门槛。最近发布的《中国老龄事业的发展》白皮书,表明中国官方已意识到人口老龄化问题的紧迫性。人口的快速老龄化,养老院紧张,老年人需要陪伴,可以预计,服务机器人将大量进入家庭,迎来服务机器人家庭化的浪潮。
四.巨头纷纷竞逐人工智能领域,智能服务机器人成为新焦点
谷歌相继收购 Schaft 、Redwood Robotics 、Industrial Perception 等 9 家机器人公司,在类人型机器人制造、人工智能、机器人协同等方面布局。不仅如此,谷歌还积极研发超快“量子计算机芯片”,使用亚原子粒子编码数据,显著提升计算速度,为机器人提供“智慧大脑”。
王石在 2016 年初公开场合发表言论:未来十年,万科要做到 30% 的物业服务用机器人替代。随着技术的不断进步,像安全检查、访客管理、保洁巡逻、设备检查等多项物业服务都能用机器人完成,不仅提升了日常工作效率,也让物业公司节省了成本。
阿里巴巴人工智能实验室在今年云栖大会上发布了天猫精灵太空蛋,不仅具备视觉技术,可以高效往返穿梭,还具备承重重 30 千克、避让行人、上下电梯等能力,即将服务于双十一前开业的未来酒店。投资阿里巴巴的软银集团创始人孙正义,也将资金投入到机器人到物联网的前沿技术中。

五.消费升级趋势下,娱乐产业的爆发
生活节奏的加快和工作的压力,更多的年轻人们将闲暇时间花在娱乐上,比如在周末住酒店旅游,短暂地逃离工作和熟悉的地方,与此同时,需要服务机器人帮助人们分担家庭工作,解放人们去做喜欢的事情,随之酝酿而生的将是广大的家庭服务机器人市场,例如家庭护理机器人、玩具机器人、安控机器人、清洁机器人都将是最为需要的。
从以上五个角度可以看出,无疑,服务机器人在各个领域都拥有着极为广阔的市场前景,但现在还面临着以下问题:
一.技术瓶颈
服务机器人的核心技术包括人机交互、导航及路径规划、多机器人协
.调、人工智能、云计算等,具体涉及语音、语义、处理器、算法、通讯、大数据、云联网等,以实现服务机器人的自主性、适应性、智能型。另外,产业链上下游的整合,包括资金、系统、应用层开发等。服务机器人目前还存在关键技术尚未突破的瓶颈。
比如,涉及到导航及路径规划的 SLAM 技术,SLAM 的数据来源于传感器,而且越来越多的 SLAM 种类来源于多个传感器融合,那么传感器的质量对 SLAM 的效果影响很大。由于产品和硬件高度差异化,而 SLAM 相关技术的整合和优化又很复杂,导致算法和软件高度碎片化,所以市场上目前还没有一套通用普适的解决方案。SLAM 技术也只是一部分,后续还需要大量的用户体验功课。
目前行业内主流的方案有激光 SLAM 和视觉 SLAM,知名厂商有思岚科技、小觅智能、云迹科技、镭神智能、速腾聚创、爱啃萝卜、uSens凌感等。激光的 3D 导航方案成本高昂,大量商业化落地仍然需要很长的一段时间,视觉 SLAM 主要通过摄像头来采集信息,成本要比激光雷达低很多。目前主流的实现视觉 SLAM 方案主要分结构光,Time-of-Flight 和纯双目三类。双目跟结构光一样,都是使用三角测量法根据物体匹配点的视差反算物体距离,只是双目是用自然光,而结构光是用主动光发射特定图案的条纹或散斑。ToF 是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。
曾经红极一时的 Kinect 1,2 代(现已停产)采用的是结构光和 ToF,ToF 和结构光都属于主动光,容易受可见光和物体表面干扰,所以更适合室内和短距离的应用场景。纯双目的方案,在黑暗条件下不能够识别无纹理的物体。
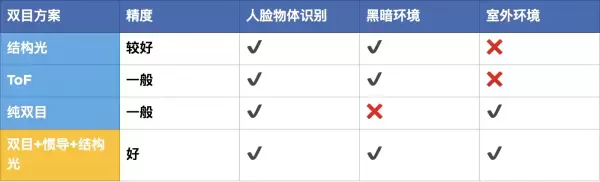
基于此,将双目和结构光的优点结合起来,小觅智能采用的多传感器融合的「视觉+结构光+惯性导航」的深度惯导相机方案成为国内外 200 家企业的首选,(IR)红外主动光探测器可辅助机器人识别室内白墙和无纹理物体,克服了普通双目不能识别无纹理物体的难题。室外工作时,识别距离可达到15米以上,非常适合服务机器人在夜间工作的场景。六轴传感器(IMU)的惯性导航又可为 VSLAM 的应用提供精动的云端互补数据,让服务机器人在可在无纹理的物体(像是白墙)和全黑情况及室内外条件下使用,也更容易商业化落地。
二.情感
美剧西部世界里所探讨的机器人是否应该拥有人类意识的问题,引起了很多人对机器人的思考。

在一些地方,尤其是体验为主的地方,比如酒店,餐厅,我们需要感受的是那种美好的服务和美食带来的体验,而服务型机器人在此刻只能作为一个辅助,做一些重复性劳动,无法代替人类传达的情感,特别是一旦遇到特别的问题,机器人如果不能在极短时间内快速解决,就会影响整个消费的体验,让形式大于内容,不利于酒店或餐厅的长远发展。
未来方向:产品差异化才能赢得市场
研究公司 IDC 称,AI 软件,硬件和服务的潜在企业市场规模巨大:到 2021 年将达到约 580 亿美元,而去年还只有 120 亿美元。不得不说,在服务机器人领域还有很多市场空白,企业应该抓住消费者不同的需求,抢占市场先机,争夺产品市场。